Experiment
Could we make a robot that moves in straight line, when wheels rotate with different speed.
What we had
We had a small robot made with few motors, L293D and nodemcu.
What we made
Added few gears, so wheels rotate with different speed. As a result one of the wheels even rotates in the different direction.
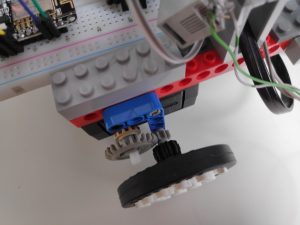
Now robot rotate on the same spot.
Changing direction for one motor, make it go circles (as one wheel is faster than the other).
Then PWM value for one motor was modified. After several tries both wheels was rotating at same speed.
Code: https://vuosaari.makerobots.eu/blog/wp-content/uploads/2021/04/2021-04-05_2motors-variable.ino
Result
Robot was able to move 5 meters forward, with both motors rotating at different speed.